▌الجزء الأول: المحرك باعتباره الجهاز العصبي للروبوت
كل حركة روبوتية - بدءًا من المعالجة الجراحية على مستوى الميكرون وحتى الفرز اللوجستي عالي السرعة - تنشأ من المشغل المشترك. ومع ذلك، غالبًا ما يتم التعامل مع اختيار المشغل على أنه مهمة شراء وليس كمشكلة هندسية على مستوى النظام.
في الواقع، يجب على مشغل المحرك المشترك للروبوت أن يدير في نفس الوقت تموج عزم الدوران، والسلوك الحراري، وزمن وصول التشفير، وتوافقيات شبكة التروس، واستقرار الحلقة المغلقة. ينتشر أي ضعف في معلمة واحدة عبر السلسلة الحركية بأكملها، مما يؤدي إلى تدهور الدقة والتكرار.
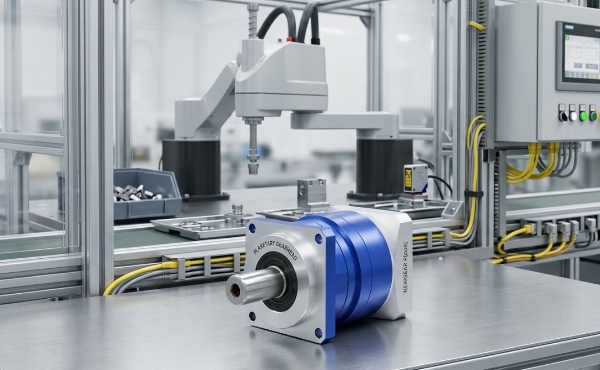
يعالج المحرك الآلي المشترك للروبوت ND-A5216-10 الذي طورته مجموعة iHF هذه المشكلة من خلال دمج المحرك وعلبة التروس الكوكبية وردود فعل التشفير المزدوج في نظام موحد مصمم بشكل مشترك بدلاً من المكونات المنفصلة. يؤدي هذا إلى التخلص من خسائر الواجهة وتحسين الاتساق الديناميكي عبر جميع أنظمة التشغيل.

▌الجزء الثاني: الانهيار الهندسي لـ ND-A5216-10
2.1 التصميم الكهرومغناطيسي: قمع عزم الدوران المسنن
يتمثل التحدي الرئيسي في الحركة الدقيقة في عزم الدوران المسنن الناتج عن التفاعل بين الجزء الدوار والجزء الثابت. إنها تنتج تموجات منخفضة السرعة، وصيدًا موضعيًا، وضوضاء صوتية.
يعمل ND-A5216-10 على تخفيف ذلك من خلال هندسة الفتحات المحسنة وتصميم الدوار المغناطيسي المنحرف. يضمن تحسين العناصر المحدودة إنتاج عزم دوران سلسًا حتى أقل من 100 دورة في الدقيقة، وهو نطاق حرج للتجميع الدقيق، والتحكم في القوة، ومهام الإدخال الدقيقة.
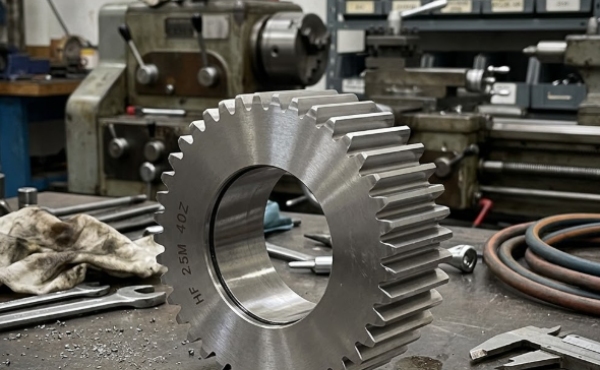
2.2 تقليل التروس الكوكبية: <3 رد فعل عنيف في الدقيقة القوسية
يدمج المحرك علبة تروس كوكبية حلزونية عالية الدقة مع رد فعل عكسي أقل من 3 دقائق قوسية (0.05 درجة). على ذراع بطول 1 متر، يتوافق هذا مع انحراف الطرف بمقدار <0.87 مم عن رد الفعل العكسي للترس وحده.
توفر التروس الحلزونية تفاعلًا تقدميًا، حيث تقدم:
● كثافة عزم الدوران أعلى من التروس المحفزة
● انخفاض انتقال الاهتزاز
● انخفاض الانبعاثات الصوتية لبيئات آمنة للإنسان
بالمقارنة مع الأنظمة المحفزة، يعمل التخفيض الكوكبي الحلزوني على تحسين السلاسة وتوزيع الحمل، مما يعزز الاستقرار الهيكلي والاستجابة الديناميكية.
2.3 بنية التشفير المزدوج
على عكس أنظمة التشفير الفردي التي تستنتج حركة الإخراج من خلال نسب التروس، يستخدم ND-A5216-10 أجهزة تشفير مزدوجة:
● التشفير على جانب المحرك للتخفيف والتحكم في السرعة
● جهاز تشفير من جانب الإخراج لموضع العمود الحقيقي
يؤدي هذا إلى التخلص من الأخطاء التراكمية الناتجة عن رد الفعل العكسي، والامتثال الالتوائي، والتمدد الحراري. كما أنه يتيح التشخيص في الوقت الحقيقي من خلال مقارنة انحراف موضع المحرك والإخراج، مما يسمح بالكشف المبكر عن التآكل الميكانيكي.
2.4 التحكم الموحد في الحلقة المغلقة
يدعم المحرك تنظيم عزم الدوران والسرعة والموضع بشكل متزامن من خلال حلقات التحكم المتتالية:
● حلقة عزم الدوران: عرض النطاق الترددي 1-5 كيلو هرتز
● حلقة السرعة: 200-500 هرتز
● حلقة الموضع: 50-200 هرتز
تعمل ديناميكيات التغذية العكسية على تعويض القصور الذاتي والتأثيرات غير الخطية، مما يقلل من خطأ التتبع أثناء التسارع السريع. يتيح ذلك التبديل السلس بين الحركة عالية السرعة والتحكم المتوافق في القوة دون انتقالات بين الأوضاع.

▌الجزء الثالث: الأداء الديناميكي والحراري
3.1 عكس الاتجاه السريع
غالبًا ما يهيمن التباطؤ والانعكاس على وقت الدورة في الروبوتات بدلاً من السرعة القصوى. يعمل ND-A5216-10 على تقليل تأخير الانعكاس من خلال:
● انخفاض القصور الذاتي للدوار
● عرض النطاق الترددي العالي للحلقة الحالية
● الامتثال الميكانيكي الخاضع للرقابة في مجموعة التروس
يؤدي ذلك إلى تقليل التذبذب وتحسين الإنتاجية في أنظمة الالتقاط والمكان واللحام والفحص.
3.2 الإدارة الحرارية
الاستقرار الحراري أمر بالغ الأهمية في عملية الخدمة المستمرة. يزيد ارتفاع درجة الحرارة من المقاومة، ويقلل من ثبات عزم الدوران، ويسرع من تقادم العزل.
يعالج المشغل هذا عبر:
● تصميم الجزء الثابت بعامل تعبئة نحاسي عالي
● مواد تأصيص موصلة للحرارة
● غلاف من الألومنيوم المضلع لتحسين الحمل الحراري
تقلل هذه الميزات من خفض السرعة وتحافظ على خرج عزم دوران ثابت أثناء التشغيل على مدار الساعة طوال أيام الأسبوع.
▌الجزء الرابع: مجالات التطبيق
4.1 التصنيع الدقيق
في التجميع الدقيق وإنتاج الإلكترونيات، تصل متطلبات الدقة إلى ±0.02–0.05 مم. يتيح ND-A5216-10 ذلك من خلال رد فعل عكسي منخفض وردود فعل مزدوجة وإخراج عزم دوران سلس. وهو فعال بشكل خاص في مفاصل المعصم للأذرع الآلية متعددة المحاور للقيام بمهام التوجيه الدقيقة.
4.2 الروبوتات التعاونية
يجب أن تتوافق الروبوتات التعاونية مع حدود القوة ISO/TS 15066 مع الحفاظ على الإنتاجية. يتيح الاحتكاك المنخفض للمشغل، والاستجابة السريعة لعزم الدوران، والتصميم المنخفض للضوضاء التفاعل البشري الآمن. تعمل التروس الحلزونية على تقليل الإخراج الصوتي، مما يحسن إمكانية الاستخدام في مكان العمل.
4.3 أتمتة الخدمات اللوجستية
في المركبات الزراعية وأنظمة الفرز، تعد القدرة على التكيف أمرًا ضروريًا. يتيح التحكم في وضع عزم الدوران التعامل مع حمولات مختلفة — بدءًا من العناصر الهشة وحتى الطرود الثقيلة — دون إجراء تغييرات في الأجهزة. يؤدي التسارع والتباطؤ السريع إلى تحسين كفاءة الإنتاجية بشكل مباشر.
4.4 أنظمة التفتيش والمختبرات
يتطلب فحص القياسات وأشباه الموصلات بيئات اهتزاز منخفضة للغاية. تعمل موازنة الدوار الخاص بالمشغل والتعشيق السلس للتروس على تقليل انتقال الاهتزاز، مما يضمن استقرار القياس في المعدات الحساسة المجاورة.
▌الجزء الخامس: فلسفة هندسة مجموعة iHF
في مجموعة iHF، يتبع تطوير المشغل فلسفة التصميم المشترك على مستوى النظام:
● تحسين كثافة عزم الدوران عبر المجالات الكهرومغناطيسية والحرارية والميكانيكية
● محاكاة للفيزياء المتعددة للتخلص من الترس والتشبع مبكرًا
● التحكم في الاهتزاز على مستوى النظام من خلال دمج المحرك والهيكل
● تصميم ميكانيكي مدرك للتحكم لتحسين الاستجابة الديناميكية
● التحقق من المتانة المستندة إلى IEC 60068 من أجل الموثوقية الصناعية
لا يعد ND-A5216-10 مكونًا مستقلاً ولكنه جزء من نظام حركة مُحسّن مصمم لبيئات التصنيع الذكية.
▌الجزء السادس: سياق السوق
يتوسع سوق مشغلات الروبوتات بسرعة بسبب:
● أتمتة الصناعة 4.0 وأنظمة الإنتاج المرنة
● نمو الروبوتات التعاونية في البيئات البشرية المشتركة
● تصغير الآلات الصناعية
● الطلب على كثافة عزم دوران أعلى في المساحات المدمجة
في هذا السياق، تعمل المحركات المدمجة مثل ND-A5216-10 على تقليل تعقيد النظام من خلال الجمع بين المحرك وعلبة التروس والاستشعار في بنية واحدة، مما يؤدي إلى تسريع دورات تطوير OEM وتحسين الموثوقية.
❓ الأسئلة الشائعة
Q1: كيف يختلف ND-A5216-10 عن أنظمة المحرك + علبة التروس؟
فهو يدمج المحرك وعلبة التروس الكوكبية وأجهزة التشفير المزدوجة في نظام مصمم بشكل مشترك، مما يزيل أخطاء المحاذاة ويحسن دقة الحلقة المغلقة.
س2: ما هو أداء رد الفعل العكسي؟
أقل من 3 دقائق قوسية، وهو ما يتوافق مع خطأ تحديد الموقع بمقدار أقل من المليمتر على الأذرع الآلية الطويلة.
س 3: لماذا التشفير المزدوج؟
فهي تزيل أخطاء الاستدلال عن طريق قياس موضع الإخراج مباشرة، وتحسين دقة المسار وتمكين الصيانة التنبؤية.
س 4: هل التحكم في عزم الدوران مدعوم؟
نعم. يدعم المحرك التحكم في عزم الدوران والسرعة والموضع في الوقت الفعلي من خلال استجابة النطاق الترددي العالي المناسبة للتطبيقات الحساسة للقوة.
س5: هل هي مناسبة للروبوتات؟
نعم. انخفاض مستوى الضجيج والتحكم المتوافق في عزم الدوران والاستجابة السريعة يجعلها مناسبة لبيئات التعاون بين الإنسان والروبوت.
س6: ما هي المزايا التي تقدمها في الأنظمة اللوجستية؟
يتيح التحكم التكيفي في عزم الدوران التعامل مع الحمولات المختلطة ذات الكتلة والهشاشة المتفاوتة دون إجراء تغييرات في الأجهزة.
س7: ما هو الدعم الذي تقدمه مجموعة iHF؟
نماذج CAD، وبيانات سرعة عزم الدوران، والتحليل الحراري، والدعم الهندسي على مستوى التطبيق لتكامل OEM.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar طلب عرض أسعار
طلب عرض أسعار