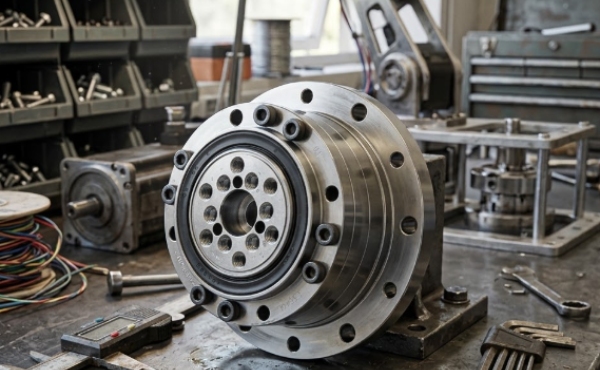
إن تطور الروبوتات المتقدمة - بدءًا من الروبوتات التعاونية (الروبوتات التعاونية) والمفاصل الصناعية إلى الأنظمة البشرية ذات القدمين - يتطلب مستوى غير مسبوق من كثافة الطاقة، والصلابة الالتوائية، ودقة تحديد المواقع. في قلب كل حركة مفصلية توجد وحدة المحرك. لتلبية هذه القيود الميكانيكية الصارمة، تتطلب بنيات الأتمتة الحديثة علبة تروس محرك آلي متكاملة للغاية تعمل على توحيد الكفاءة الكهرومغناطيسية مع تقليل ميكانيكي رد الفعل العكسي صفر.
باعتبارها شركة رائدة رائدة في مجال حلول النقل الصناعي والتحكم في الحركة، قامت مجموعة iHF بتصميم وحدة مشغل مؤازر متكاملة ومتطورة. من خلال الجمع بين محرك مغناطيسي دائم ذو عزم دوران منخفض للغاية ومخفض تروس كوكبي عالي الدقة، توفر مجموعة iHF الأساس الميكانيكي اللازم للأنظمة الروبوتية من الجيل التالي.
⚙️1. ما هي علبة التروس الآلية المشتركة للروبوت؟
إن Robot Joint Motor Gearbox هو نظام كهروميكانيكي متكامل يستخدم في المفاصل الآلية لتحويل خرج المحرك عالي السرعة وعزم الدوران المنخفض إلى حركة منخفضة السرعة وعزم الدوران العالي مع إمكانية التحكم الدقيقة. فهو يجمع عادةً بين محرك مؤازر أو محرك بدون فرش، وعلبة تروس دقيقة (غالبًا ما تكون تروس كوكبية أو حلزونية)، ونظام تغذية مرتدة مثل المشفر لتحقيق التحكم في الحلقة المغلقة لعزم الدوران والسرعة والموضع. يسمح ذلك للمفاصل الآلية بالحفاظ على تشغيل مستقر منخفض السرعة، وعكس الاتجاه السريع، وكثافة عزم الدوران العالية، والاهتزاز المنخفض، وأداء الضوضاء المنخفض. تعمل التصميمات المتقدمة أيضًا على تحسين هيكل فتحة المحرك لتحسين كفاءة عزم الدوران، وتقليل عزم الدوران المسنن لحركة أكثر سلاسة، وقد تتضمن أجهزة تشفير مزدوجة لتعزيز الدقة. في التكوينات المتطورة، يمكن توصيل وحدات متعددة عبر اتصالات السلسلة التعاقبية لتبسيط نقل الطاقة والبيانات في الأنظمة الآلية متعددة المحاور. بشكل عام، يعد مكونًا أساسيًا يتيح الحركة الدقيقة في الروبوتات الصناعية والروبوتات التعاونية وأنظمة الحركة الآلية.


🔩 2. البنية الوظيفية الأساسية لعلبة التروس الآلية المشتركة للروبوت
يدمج نظام علبة التروس للمحرك المشترك الآلي تقنية قيادة المحرك مع آليات التخفيض عالية الدقة، مما يتيح التحكم في الحركة في المفاصل الآلية.
وتشمل وظائفها الأساسية ما يلي:
● تضخيم عزم الدوران
● تخفيض السرعة وتثبيتها
● التحكم الدقيق في الموقف
● التحولات الاتجاهية على نحو سلس
وهذا يسمح للروبوتات بأداء حركات معقدة ذات تكرار ودقة عالية.
🎯 3. مزايا الأداء الرئيسية
⚡3.1 التحكم الدقيق بالسرعة المنخفضة
أحد المتطلبات الأكثر أهمية في مجال الروبوتات هو التشغيل المستقر بسرعات منخفضة. يحافظ النظام على:
● خرج عزم دوران ثابت
● دقة الحركة الدقيقة
● السلوك التناوبي السلس
يعد هذا ضروريًا لمهام مثل التجميع واللحام والروبوتات الجراحية.
🔄 3.2 القدرة على عكس الاتجاه السريع
يتيح صندوق التروس الاستجابة السريعة للمحرك أثناء تغييرات الاتجاه، مما يؤدي إلى تحسين:
● كفاءة وقت الدورة
● مرونة الحركة
● الاستجابة الديناميكية في الأذرع الآلية
🔁 3.3 نظام التحكم في الحلقة المغلقة
من السمات الرئيسية لأنظمة الروبوت المشتركة الحديثة التحكم في ردود الفعل ذات الحلقة المغلقة، مما يتيح ما يلي:
● التحكم في عزم الدوران
● تنظيم السرعة
● تحديد المواقع الزاوي بدقة
وهذا يضمن تصحيح الحركات الروبوتية بشكل مستمر في الوقت الفعلي لتحقيق أقصى قدر من الدقة.
🌊 3.4 تشغيل منخفض الاهتزاز والضوضاء
التصميم الهيكلي الأمثل يقلل من عدم الاستقرار الميكانيكي، مما يؤدي إلى:
● انخفاض سعة الاهتزاز
● انخفاض مستوى الضجيج الصوتي
● أداء تشغيلي أكثر سلاسة
وهذا مهم بشكل خاص للروبوتات التعاونية التي تعمل بالقرب من البشر.
🧠 4. ميزات التصميم الهندسي المتقدم
🧩 4.1 تصميم فتحة محرك ذات كثافة عزم دوران عالية
تم تصميم المحرك باستخدام هندسة الفتحات المُحسّنة، مما يؤدي إلى تحسين:
● الكفاءة الكهرومغناطيسية
● إخراج كثافة عزم الدوران
● تخفيض عزم الدوران
وهذا يسمح بأداء أعلى في الهياكل المشتركة الروبوتية المدمجة.
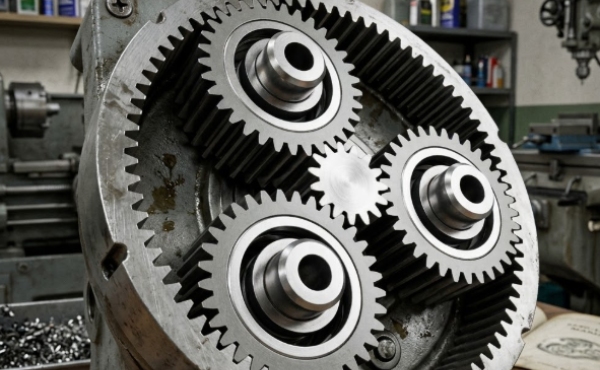
⚙️ 4.2 مخفض التروس الكوكبي عالي الدقة
يوجد في قلب علبة التروس نظام تروس كوكبي حلزوني، مصمم من أجل:
● كفاءة نقل الأحمال العالية
● تحويل عزم الدوران مستقر
● انخفاض رد الفعل الميكانيكي
يحقق النظام دقة دائرية لجذر الأسنان أقل من 3 دقائق قوسية، مما يضمن دقة موضعية استثنائية في التحكم في الحركة الآلية.
🎛️ 4.3 نظام ردود الفعل التشفير المزدوج
تدعم التكوينات المتقدمة أجهزة التشفير المزدوجة، مما يعزز بشكل كبير:
● الدقة الموضعية
● قرار ردود الفعل عزم الدوران
● تكرار النظام والاستقرار
وهذا يتيح حركة روبوتية فائقة الدقة في بيئات التشغيل الآلي المتطورة.
🔗 4.4 معمارية الاتصالات ذات السلسلة التعاقبية
يدعم النظام تكوين السلسلة التعاقبية، مما يسمح بما يلي:
● بنية الأسلاك المبسطة
● تقليل تعقيد التثبيت
● نقل متكامل للطاقة والبيانات عبر وصلات متعددة
وهذا مهم بشكل خاص في الأنظمة الروبوتية متعددة المحاور ومنصات الروبوتات البشرية.
🏭 5. التطبيقات الصناعية لأنظمة علبة التروس الآلية المشتركة للروبوت
🤖 الروبوتات الصناعية
تستخدم في الأذرع الآلية للحام والتجميع ومناولة المواد.
🏥 الروبوتات الطبية
يدعم الروبوتات الجراحية التي تتطلب دقة حركة عالية جدًا.
🧑🤝🧑 الروبوتات التعاونية (الروبوتات التعاونية)
يتيح التفاعل الآمن والسلس بين الإنسان والروبوت مع انخفاض مستوى الضجيج والاهتزاز.
🚗 تصنيع السيارات
تستخدم في خطوط التجميع الدقيقة وأنظمة الإنتاج الآلي.
📦 أتمتة الخدمات اللوجستية
يدعم أنظمة الفرز والانتقاء والتعبئة الآلية.

🏗️ 6. الأهمية الهندسية لاختيار علبة التروس
يعد اختيار علبة التروس المناسبة للمحرك المشترك للروبوت أمرًا بالغ الأهمية لأنه يؤثر بشكل مباشر على:
● دقة الحركة
● الحمولة
● استقرار النظام
● خدمة الحياة
● كفاءة الطاقة
يمكن أن يؤدي التصميم السيئ لعلبة التروس إلى:
● أخطاء رد فعل عنيف
● ارتفاع درجة الحرارة
● عدم استقرار الاهتزاز
● انخفاض الدقة الروبوتية
🏢 7. الابتكار الهندسي لمجموعة iHF في أنظمة الحركة الروبوتية
باعتبارها شركة مصنعة متخصصة في أنظمة الحركة والنقل، تقوم مجموعة iHF بتطوير حلول علبة التروس الآلية المشتركة عالية الأداء المصممة للروبوتات الحديثة.
ويركز نهجهم الهندسي على:
● تصميم تروس كوكبية عالي الكفاءة
● التكامل الحركي الدقيق
● نسبة عزم الدوران الأمثل إلى الحجم
● بنية ميكانيكية منخفضة الضوضاء
● التوافق مع التحكم في ردود الفعل المتقدمة
بدلاً من تقديم مكونات ميكانيكية عامة، تؤكد مجموعة iHF على تحسين الحركة على مستوى النظام، مما يضمن التكامل السلس في المنصات الآلية المتقدمة.
🚀 8. الاتجاهات المستقبلية في تقنية علبة التروس الآلية المشتركة للروبوت
تتطور صناعة الروبوتات بسرعة، مما يدفع الابتكار في أنظمة علبة التروس:
● تعويض الحركة القائم على الذكاء الاصطناعي
● تصغير كثافة عزم الدوران الأعلى
● أنظمة تروس رد فعل عنيف منخفضة للغاية
● مشغلات ذكية متكاملة تمامًا
● تحسين كفاءة استخدام الطاقة للروبوتات البشرية
ستحدد هذه الاتجاهات الجيل القادم من أنظمة الحركة الروبوتية الذكية.
🧾 9. الأسئلة الشائعة: علبة التروس الآلية المشتركة للروبوت
❓ ما الذي يجعل علبة التروس للمحرك المشترك الآلي مختلفة عن علبة التروس القياسية؟
إنه يدمج التحكم في المحرك وتقليل الدقة في نظام واحد مُحسّن لدقة الحركة الآلية.
❓ لماذا يعتبر الاهتزاز المنخفض مهمًا في الروبوتات؟
يضمن الاهتزاز المنخفض دقة أعلى وحركة أكثر سلاسة وتحسين سلامة التفاعل بين الإنسان والروبوت.
❓ما هو دور علبة التروس الكوكبية في الروبوتات؟
إنه يوفر كثافة عزم دوران عالية، هيكل مدمج، ونقل حركة مستقر للمفاصل الآلية.
❓لماذا نستخدم أجهزة التشفير المزدوجة في المفاصل الروبوتية؟
تعمل أجهزة التشفير المزدوجة على تحسين دقة التغذية المرتدة والتكرار واستقرار التحكم في حركة الحلقة المغلقة.
❓ما هي الصناعات الأكثر استفادة من هذه الأنظمة؟
الأتمتة الصناعية، والروبوتات الطبية، والأنظمة اللوجستية، وتصنيع السيارات، والروبوتات التعاونية.
🧾 الخلاصة: الحركة الدقيقة تحدد مستقبل الروبوتات
تعد علبة التروس للمحرك المشترك للروبوت مكونًا أساسيًا في الروبوتات الحديثة، مما يتيح التحكم الدقيق والمستقر والذكي في الحركة عبر التطبيقات المتنوعة.
بفضل الميزات الهندسية المتقدمة مثل التحكم في الحلقة المغلقة، وردود فعل التشفير المزدوج، ودقة التروس الكوكبية، والتشغيل منخفض الاهتزاز، تعد هذه الأنظمة ضرورية للأداء الآلي من الجيل التالي.
من خلال الابتكار المستمر، تقدم مجموعة iHF حلول حركة عالية الدقة تمكن مصنعي الروبوتات من تحقيق كفاءة ودقة وموثوقية أعلى للنظام في بيئات التشغيل الآلي المتزايدة التعقيد.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar طلب عرض أسعار
طلب عرض أسعار