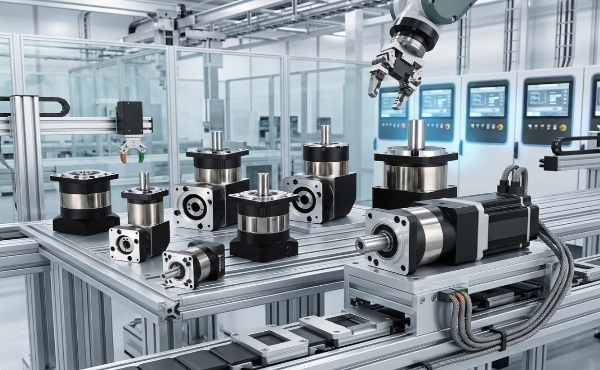
إن التوجه العالمي نحو الأتمتة الصناعية المتقدمة، والروبوتات التعاونية ذات الحمولة العالية، والأذرع الطبية الجراحية، وأنظمة الدفاع متعددة المحاور، يفرض متطلبات شديدة على المحركات الكهروميكانيكية. غالبًا ما تضيف المحركات المؤازرة التقليدية المعبأة حجمًا كبيرًا ووزنًا زائدًا وامتثالًا ميكانيكيًا للتصميمات المشتركة. لتحقيق حركة سلسة وعزم دوران عالي في المساحات الضيقة، يتجه مهندسو التصميم الحديث إلى محركات مفاصل عزم الدوران المدمجة بدون إطار .
من خلال دمج الجزء الثابت والعضو الدوار مباشرة في الهيكل الهيكلي للماكينة، تعمل هذه المجموعات المتكاملة على التخلص من الأعمدة والمحامل والوصلات غير الضرورية. ومع ذلك، فإن تحقيق الدقة الحقيقية في المفاصل المدمجة يتطلب أكثر بكثير من مجرد التكامل الأساسي؛ فهو يتطلب ضبطًا مغناطيسيًا متقدمًا، وآليات ردود فعل دقيقة، واتصالًا مبسطًا بالنظام.
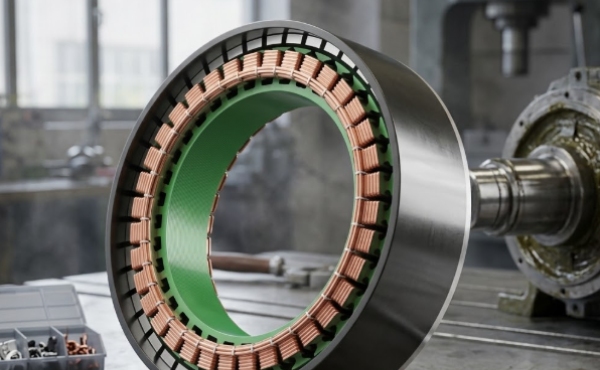
💡 تصميم مغناطيسي متقدم: زيادة كثافة عزم الدوران إلى أقصى حد مع تخفيف التعرق
في التحكم الدقيق في الحركة، غالبًا ما يكون أداء المحرك محدودًا بحدوده الحرارية والاحتكاك المغناطيسي المتأصل. تعاني المحركات القياسية بدون إطار في كثير من الأحيان من عزم دوران مسنن شديد - سحب مغناطيسي دوري بين مغناطيس الدوار وفتحات الجزء الثابت - مما يؤدي إلى انخفاض دقة تحديد المواقع عند السرعات البطيئة.
ولمعالجة هذه القيود، تنفذ المفاصل الآلية الحديثة تصميمًا محسنًا لفتحة المحرك. من خلال حساب الانحراف الهندسي الدقيق لفتحات الجزء الثابت أو تغيير تخطيط المغناطيس الدائم على الدوار، يمكن للمهندسين تقليل تأثيرات التسنن بشكل كبير. وينتج هذا التصميم كثافة عزم دوران عالية بشكل ملحوظ، مما يضمن أقصى إنتاج لعزم الدوران لكل وحدة حجم مع الحفاظ على دوران سلس.
● التميز في التحكم بالسرعة المنخفضة: بفضل هذه البنية المغناطيسية المحسنة، يحافظ النظام على التحكم الدقيق عند السرعات المنخفضة. إنه يزيل مشكلات الانزلاق الشائعة في تكوينات محرك الأقراص المباشر ذات الطرف السفلي، وهو أمر بالغ الأهمية للحام عالي الدقة، والتجميع الدقيق، والتطبيقات الجراحية الدقيقة.
● اهتزاز منخفض وتشغيل صامت:يضمن هذا الضبط الهيكلي استجابة سريعة وتشغيلًا مستقرًا واهتزازًا منخفضًا وضوضاء منخفضة. يعد التخلص من الرنين الصوتي عالي التردد أمرًا حيويًا بشكل خاص لغرف العمليات الطبية ومساحات العمل التعاونية في غرف الأبحاث.
🛠️ الكينماتيكا الميكانيكية: دمج المخفضات الكوكبية عالية الدقة
توفر مجموعة المحركات بدون إطار عزم دوران كهرومغناطيسي خام، ولكن تحويل هذه الطاقة إلى مفصل آلي قابل للاستخدام يتطلب نظامًا عالي الأداء لتقليل السرعة. يوفر دمج مخفض التروس الكوكبي عالي الدقة الذي يتميز بملفات تروس حلزونية متقدمة حلاً قويًا وصغير الحجم للغاية.
معايرة رد الفعل العكسي المنخفضة للغاية: تقدم علب التروس التجارية القياسية رد فعل عنيفًا كبيرًا، مما يفسد إمكانية تكرار الموضع. تتميز المفاصل المتكاملة المتميزة باستدارة جذر الأسنان لمدة تقل عن 3 دقائق قوسية. يضمن هذا التسامح الهندسي المحكم صلابة الالتوائية المتميزة ويقلل من الحركة المفقودة أثناء الدورات ثنائية الاتجاه.
عكس الاتجاه السريع: إن القصور الذاتي المنخفض للدوار بدون إطار، المقترن بالملاءمة الدقيقة للتروس الكوكبية الحلزونية، يتيح عكس اتجاه المحرك السريع. يمكن للمشغل أن يدور بشكل فوري تحت الحمل العالي دون التعرض لصدمات ميكانيكية أو إجهاد مجموعة نقل الحركة.


🏢 ذكاء الحلقة المغلقة: معيار تشغيل مجموعة iHF
بالنسبة لمصنعي الروبوتات الصناعية ومتكاملي أنظمة التشغيل الآلي، فإن تجميع الأجزاء الساكنة والدوارات وتروس موجة الضغط وأجهزة التشفير المنفصلة من بائعين مختلفين يمثل عنق زجاجة محبطًا للتصنيع. غالبًا ما يؤدي عدم التوافق بين المكونات إلى تأخر الإشارة، ومشكلات التمدد الحراري، وإجراءات المعايرة المعقدة.
ولحل هذه التحديات الصناعية، قامت مجموعة iHF بتصميم حل مشترك متكامل وعالي الأداء. من خلال مطابقة تقنية الدفع المباشر الدقيقة مع أجهزة التغذية المرتدة المتقدمة، توفر أنظمة iHF Group أداءً لا مثيل له للمحرك المباشر بمجرد إخراجه من الصندوق.
⚙️ تحكم حقيقي في حلقة مغلقة متعددة المتغيرات: تحقق وحدات التحكم في مجموعة iHF تحكمًا كاملاً وحتميًا في حلقة مغلقة في عزم الدوران والسرعة والموضع. تقوم خوارزميات التحكم المتقدمة الموجهة ميدانيًا (FOC) بمعالجة ملفات التعريف الحالية في الوقت الفعلي، مما يمنع أخطاء التتبع حتى أثناء الحركات الديناميكية للغاية.
📊 بنية ردود الفعل للتشفير المزدوج: للتخلص من أخطاء تحديد المواقع الناتجة عن انحراف الترس المادي تحت الأحمال الثقيلة، يدعم النظام أجهزة التشفير المزدوجة لزيادة تعزيز دقة التحكم في ردود الفعل. يقوم جهاز التشفير التزايدي أو المطلق عالي الدقة بمراقبة عمود المحرك عالي السرعة، بينما يقوم جهاز التشفير المطلق الثانوي بمراقبة وصلة الإخراج منخفضة السرعة مباشرة. يقوم هذا الإعداد بقياس وتصحيح الانحرافات الصغيرة بشكل مستمر في الوقت الفعلي.


🔌 تبسيط تضاريس النظام: هندسة السلسلة التعاقبية
مع إضافة الأنظمة الروبوتية المزيد من المحاور - مثل الروبوتات ذات المحاور السبعة أو الهياكل البشرية المعقدة - تصبح إدارة نول الأسلاك الداخلية معقدة للغاية. يؤدي تشغيل كابلات الطاقة والتغذية المرتدة المخصصة من خزانة التحكم المركزية من خلال كل وصلة إلى حزم كابلات سميكة تحد من حركة المفصل وتزيد من مخاطر الفشل بسبب الالتواء المستمر.
تتغلب المفاصل الحديثة عالية الكثافة على هذا من خلال دمج تخطيط الاتصالات التسلسلية الموفر للمساحة. ويدعم النظام تكوين السلسلة التعاقبية لوحدات متعددة، مما يسهل إمداد الطاقة ونقل البيانات. من خلال تضمين محرك أقراص صغير موضعي داخل كل مفصل، يمكن توجيه ناقل طاقة DC مشترك واحد وكابل Ethernet صناعي عالي السرعة (مثل EtherCAT أو CANopen) بشكل تسلسلي من مفصل إلى آخر. يؤدي هذا إلى تقليل الوزن الإجمالي للكابل بشكل كبير، وتبسيط التوجيه الفعلي، وتعزيز موثوقية النظام بشكل عام.
❓ نظرة فنية عميقة: أسئلة وأجوبة حول الصناعة
س1: كيف يحمي إعداد التشفير المزدوج من التآكل الميكانيكي بمرور الوقت؟
ج: في نظام التشفير الفردي، إذا تعرضت التروس الكوكبية لتآكل طفيف أو رد فعل عنيف على مدار سنوات من الخدمة، تظل وحدة التحكم غير مدركة للخطأ المادي في شفة الإخراج. من خلال الاستفادة من دعم التشفير المزدوج الذي توفره مجموعة iHF، يقوم جهاز التشفير الثانوي بمراقبة موضع الأداة الفعلي مباشرة. حتى في حالة حدوث تآكل ميكانيكي داخل المخفض، يقوم نظام الحلقة المغلقة تلقائيًا بتعويض التباين، مما يضمن احتفاظ الروبوت الخاص بك بدقة أقل من المليمتر طوال حياته التشغيلية.
س 2: لماذا تُفضل التروس الحلزونية على التروس المحفزة في تطبيقات الوصلات ذات عزم الدوران العالي؟
ج: تتميز التروس الحلزونية بخطوط أسنان ذات زوايا تتفاعل تدريجيًا وليس دفعة واحدة. يؤدي هذا التلامس التدريجي للأسنان إلى زيادة نسبة التلامس الإجمالية بشكل كبير، مما يؤدي إلى توزيع الأحمال الميكانيكية العالية عبر أسنان متعددة. يتيح هذا التصميم بشكل مباشر استدارة جذر الأسنان لمدة أقل من 3 دقائق قوسية، ويقلل الضوضاء الصوتية، ويوفر قوة الالتواء الفائقة المطلوبة لارتفاع عزم الدوران المفاجئ.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar طلب عرض أسعار
طلب عرض أسعار